
Réseau européen – Gillesville
Réseau en cours de construction (documentation en cours)
Le cahier des charges
Ce nouveau réseau devait répondre à plusieurs attentes :
Le projet de réseau dit “Européen” est né fin 2017 après la finalisation du réseau “Americain”.
- créer un réseau modulaire moins volumineux que le réseau “Americain” pour faciliter son transport et son intégration dans les expositions,
- permettre une exploitation digitale sécurisée par ordinateur, en mode automatique et/ou manuel,
- intégrer un haut niveau d’animations (éventuellement actionnables par le public) et un circuit routier avec véhicules fonctionnels,
- échelle HO, voie en code 100, décor : petite ville en face avant avec zones industrielles aux extrémités, un peu de relief, zone de stockage en arrière plan, bâtiments époque 3 et supérieure, l’électricication n’est pas envisagée dans un premier temps,
La conception
La conception du réseau a été effectué avec le logiciel Anyrail
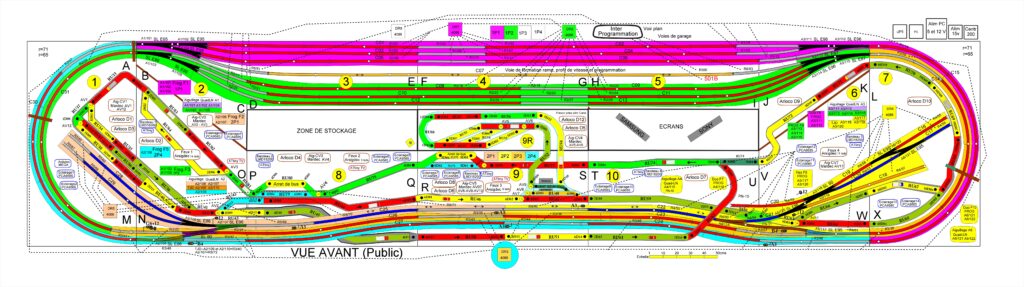
- Le réseau se présente sous forme d’un ovale de 6,95m x 1,50 m. La face avant se compose de 3 modules de 1,25 m x 0,70 m, la face arrière de 3 modules de 1,25 m x 0,50 m, chaque extrémité de 2 modules de 0,80 m x 1,50m,
- Le plan de voies est constitué de 2 voies principales à circulation en sens opposés et une voie secondaire reliant les extrémités du réseau où sont implantés une zone industrielle d’un côté et une carrière de l’autre côté
- Le plan de route est constitué d’une boucle à sens unique avec des embranchements , des arrêts de bus, des dessertes d’usines, un passage à niveau, une station services et un parking en coulisse pour le rechargement des véhicules,
- Les trajets des trains et des véhicules sont pilotés par ordinateur. Pour ce faire les parcours sont découpés en cantons, surveillés par des détecteurs de consommation de courant ( Cartes Digitrax ….) pour les trains et par des capteurs à effet hall reliés à des modules Arcomora pour les véhicules,
- Le réseau sera exploité par la centrale Digitrax DCS100, piloté par le logiciel Train Controller version Gold. Les informations seront échangées au moyen du bus Loconet.
- Le réseau Gillesville sera doté d’un éclairage et d’animations limineuses réalisés avec des Leds. Ce réseau sera également “opéré” en mode jour/nuit avec des transitions douces.
La réalisation
La réalisation a débuté en 2018.
- La créations des modules
-
- Le réseau se présente sous forme d’un anneau de 6,95 m x 1,50m. La face avant se compose de 3 modules de 1,25m x 0,70m, la face arrière de 3 modules de 1,25mx 0,50m, les extrémités de 2 modules de 0,80m x 1,50m chacune.
- Les modules sont réalisés en contreplaqué de 10mm
- Le piétement des modules est réalisé en tube de fer carré de 15mm, soudés, monté sur charnière et rabattable sous le module avec blocage pour le transport
- Les faces des caissons de transport sont fixées sur le réseau au moyen de charnières à piano. Elles sont réalisées en panneaux de contreplaqué de 10mm qui se déplient en exposition et cachent ainsi le piétement du réseau. Les côtés des modules sont protégés par des flasques en contreplaqué de 10mm.
-
- La pose de la voie et de la route
-
- Le réseau ferroviaire est construit avec de la voie flexible Peco code 100 posée sur une semelle de liège de 4mm d’épaisseur.
- Les aiguillages sont des Electrofog et les TJD des Insulfrog de Peco. Ils sont commandés par des décodeurs stationnaires de Quad LN de TamValley Depot permettant de commander 4 aiguillages. ??????? Utilisation d’Octopuss ??????? L’alimentation des coeurs d’aiguillages s’effectue par des commandes de coeur de type DCC Frog Juicer de tam Valley Depot.
- Les voies sont découpées en cantons permettant la détection par consommation de courant (modules Digitrax BDL 162).
- Les aiguillages sont des Electrofog et les TJD des Insulfrog de Peco. Ils sont commandés par des décodeurs stationnaires de Quad LN de TamValley Depot permettant de commander 4 aiguillages. ??????? Utilisation d’Octopuss ??????? L’alimentation des coeurs d’aiguillages s’effectue par des commandes de coeur de type DCC Frog Juicer de tam Valley Depot.
- Le réseau routier est constitué d’un fil de guidage noyé dans la route. Les embranchements sont gérés par des servomoteurs. Le réseau est “parsemé” de 120 capteurs à effet Hall permettant de détecter le passage des véhicules et de déclencher des actions (arrêts, priorités, déclenchements feux,…)
- Le réseau ferroviaire est construit avec de la voie flexible Peco code 100 posée sur une semelle de liège de 4mm d’épaisseur.
-
- La gestion des éclairages et des animations se fera au moyen d’un Arduino et de modules ADAFRUIT
- Le schéma de principe, les détails techniques et les différentes effets sont décrits –>
- L’exploitation du réseau
-
- L’exploitation est réalisée au moyen d’une centrale DCC (Digitrax DCS100 Chief II) qui fournit le courant de traction DCC réparti en 4 zones indépendantes au moyen d’un module (Digitrax PM4).
-
- Le décor
-
- Le fond de décor représente dans sa partie centrale, une petite ville avec un quartier médiéval. Les extrémités du réseau sont plus industrieuses.
- Le relief est principalement réalisé en polystyrène extrudé.
-
Les tests
- Les premiers tests de la partie ferroviaire ont eu lieu en 2021
-
- Ces tests ont permis de mettre en évidence quelques erreurs de câblage et de détections “fantômes”
- Le réseau a été présenté au public lors de la porte ouverte organisée le11/09/2022 dans le cadre de la Bourse de modélisme ferroviaire et de l’exposition consacrée au 40 ans du TGV. A cette occasion, plusieurs rames de Trains à Grande Vitesse nt pu circuler simultanément sans incident.
-
L’exploitation
- la première sortie en exposition est prévue pour le premier semestre 2024